Regolatore PDI o Standard
Il termine “controllo” definisce l’azione svolta per portare, e mantenere, ad un valore prefissato un parametro fisico di un impianto o di un processo (ad esempio, la temperatura di un forno, il livello di un fluido, la posizione del braccio di un robot, la velocità di rotazione di un motore, l’automatismo che regola il servomotore, ecc.).
Nella categoria dei regolatori standard tempo invarianti sono molto diffusi dei particolari dispositivi che utilizzano tre tipi di leggi di controllo diverse. Essi vengono chiamati PID, acronimo che deriva dalle tre azioni svolte da questi dispositivi, che sono rispettivamente: azione Proporzionale, azione Integrale e azione Derivativa.
I regolatori PID sono dei regolatori standard che, per mezzo di dispositivi di correzione (manopole o software di ausilio), permettono di regolare i parametri del sistema di controllo entro ampi limiti, così da poter essere adattati al particolare sistema di regolazione in cui vengono inseriti.
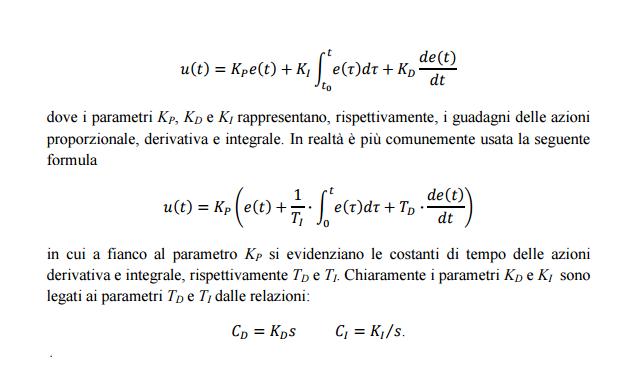
Regolatore PDI nel dominio del tempo

Regolatore PDI nel dominio di s
Nei regolatori PDI abbiamo i tre blocchi con costante proporzionale Kp, costante integrativa Ki e costante derivativa Kd che si sommano tra di loro e che ha questo schema a blocchi.

In alcuni testi scolastici il segnale di ingresso del regolatore PDI è anche chiamato E(s) cioè segnale di errore, e il segnali di uscita del regolatore PDI con il nome C(s) cioè segnale controllante.
Per passare dal dominio del tempo al dominio di s, basta fare dalle formule precedenti le lo ro trasformate.
Ricordiamo che la trasformata della derivata di una funzione f(t) dà:
L[f'(t)]=L[df(t)/dt]= s*F(s)
mentre la trasformata dell'integrale di f(t) dà F(s)/s
Utilizzando questa simbologia si ha il seguente schema a blocchi:


Questo regolatore ha una risposta in frequenza data dalla somma dei tre contributi: proporzionale, derivativo e integratico e il suo diagramma di Bode è il seguente:

